この記事は私が担当している講義ロボットプログラミングⅡ用です。シミュレータGAZEBOを使い、Turtlebotを動かします。次のROS Wikiを参考にしています。
1. Turtlebot用のパッケージインストール
まず、Turtlebot用のパッケージをインストール。端末を開き、次のコマンドを実行。
$ sudo apt-get update
$ sudo apt-get install ros-indigo-turtlebot ros-indigo-turtlebot-apps ros-indigo-turtlebot-interactions ros-indigo-turtlebot-simulator ros-indigo-kobuki-ftdi ros-indigo-rocon-remocon ros-indigo-rocon-qt-library ros-indigo-ar-track-alvar-msgs
$ . /opt/ros/indigo/setup.bash
上はドットコマンド(.)といい、ドット(.)の後にスペース、そのあとにコマンドを入れる。機能は現在のシェルからそのコマンドを実行する。通常はコマンドを実行すると別のシェルが呼び出されコマンドを実行するが、現在のシェル変数などは引き継がれない。また、ドットコマンドは、そのコマンドの実行権限がなくても実行できる。ドットコマンドの代わりにsourceコマンドも利用できる。
$ rosrun kobuki_ftdi create_udev_rules
2. ロボットをキーボードから動かそう
これからキーボードでシミュレータ上のロボットを操縦します。まず、roslaunchコマンドでシミュレータを起動。
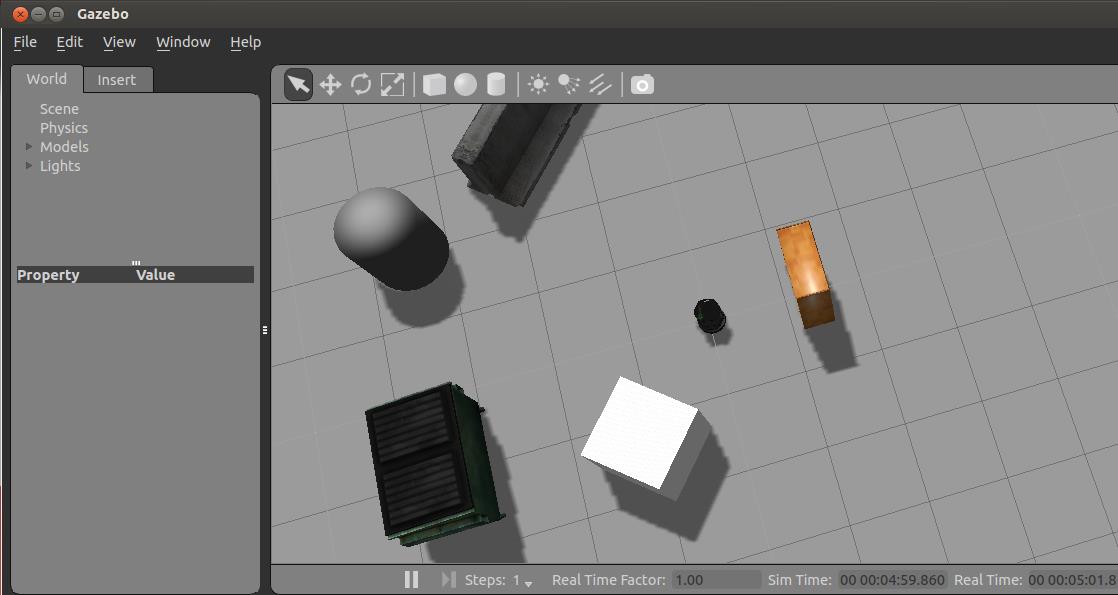
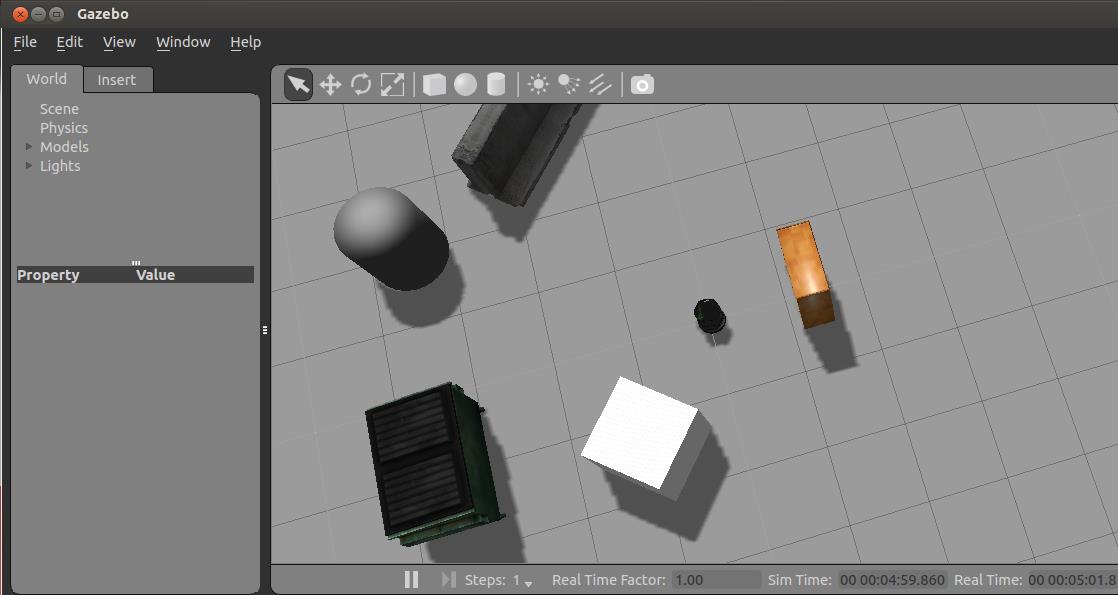
$ roslaunch turtlebot_gazebo turtlebot_world.launch
初回はネットからモデルを取得するので、私の環境で10分程度かかった。しばらくすると次のようなウインドウが開く。黒い円柱状のロボットがturtlebot。
次に、ロボットを動かすための最小限(minimal)ノードを起動。
$ roslaunch turtlebot_bringup minimal.launch
別の端末を開き、次のコマンドを入力するとキーボードからロボットを操縦するノードを起動。
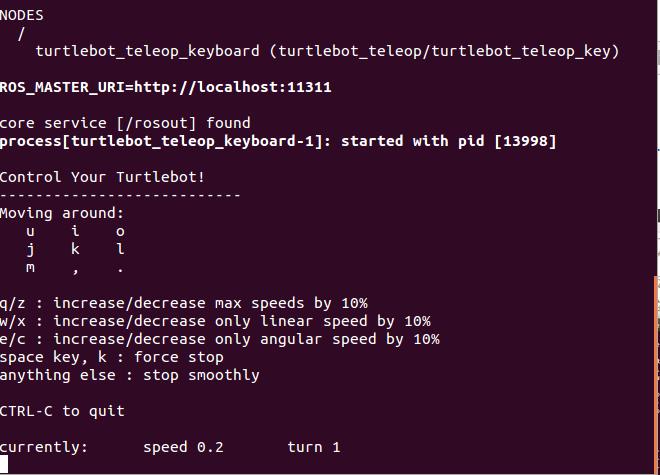
$ roslaunch turtlebot_teleop keyboard_teleop.launch
端末に下のように表示される。u i o j k l m , .キーでロボットを操作できる。いずれかのキーを押してロボットを動かそう!
これで動かない場合は、minimal.launchを起動している端末ごと終了させて、再度、新しい端末を開いて、minimal.launchを起動してください。
3. キーボードから動かすプログラムを作ろう!
キーボードからロボットを操縦するmy_teleopパッケージを作りましょう。
第3週と同じ要領でmy_teleopパッケージを作ります。今週の例ではhello, hello_nodeをmy_teleopに置き換えてください。
以下のプログラムはmy_teleop.cpp。エディタにコピペして名前を付けて保存。
保存ディレクトリは~/catkin_ws/src/my_teleop/srcの中。
#include "ros/ros.h" // rosで必要はヘッダーファイル
#include <geometry_msgs/Twist.h> // ロボットを動かすために必要
using namespace std;
int main(int argc, char **argv)
{
ros::init(argc, argv, "my_teleop");
// initでROSを初期化し、my_teleopという名前をノードにつける
// 同じ名前のノードが複数あるとだめなので、ユニークな名前をつける
ros::NodeHandle nh;
// ノードハンドラの作成。ハンドラは必要時に起動される。
ros::Publisher pub;
// パブリッシャの作成。トピックに対してデータを送信。
ros::Rate rate(10);
// ループの頻度を設定。この場合は10Hz、1秒間に10回数、1ループ100ms。
geometry_msgs::Twist vel;
// geometry_msgs::Twist この型は並進速度と回転速度(vector3:3次元ベクトル) を合わせたもので、速度指令によく使われる
pub= nh.advertise<geometry_msgs::Twist>("/cmd_vel_mux/input/teleop", 10);
// マスターにgeometry_msgs::Twist型のデータを送ることを伝える
// マスターは/cmd_vel_mux/input/teleopトピック(1番目の引数)を購読する
// 全てのノードにトピックができたことを知らせる(advertise)。
// 2番目の引数はデータのバッファサイズ
std::cout << "f: forward, b: backward, r: right, l:left" << std::endl;
while (ros::ok()) // このノードが使える間は無限ループ
{
char key; // 入力キーの値
cin >> key;
cout << key << endl;
switch (key) {
case 'f': vel.linear.x = 0.5; break;
case 'b': vel.linear.x = -0.5; break;
case 'l': vel.angular.z = 1.0; break;
case 'r': vel.angular.z = -1.0; break;
// linear.xは前後方向の並進速度(m/s)
// angular.zは回転速度(rad/s)
}
pub.publish(vel); // 速度メッセージを送信
ros::spinOnce(); // コールバック関数を呼ぶ
vel.linear.x = 0.0; // 並進速度の初期化
vel.angular.z = 0.0; // 回転速度の初期化
rate.sleep(); // 指定した周期でループするよう寝て待つ
}
return 0;
}
では、以下のコマンドでビルドして実行しよう。
$ cd ~/catkin_ws
$ catkin_make
先ほどの、roslaunch turtlebot_teleop keyboard_teleop.launch の代わりに、次のコマンドを実行する。
$ rosrun my_teleop my_teleop
f, b, l, rキーでロボットが移動したら成功。
終わり
終わり

コメント