

つくばチャレンジ2010:けんせいちゃん3号機 ファイナル走行の前のパフォーマンス
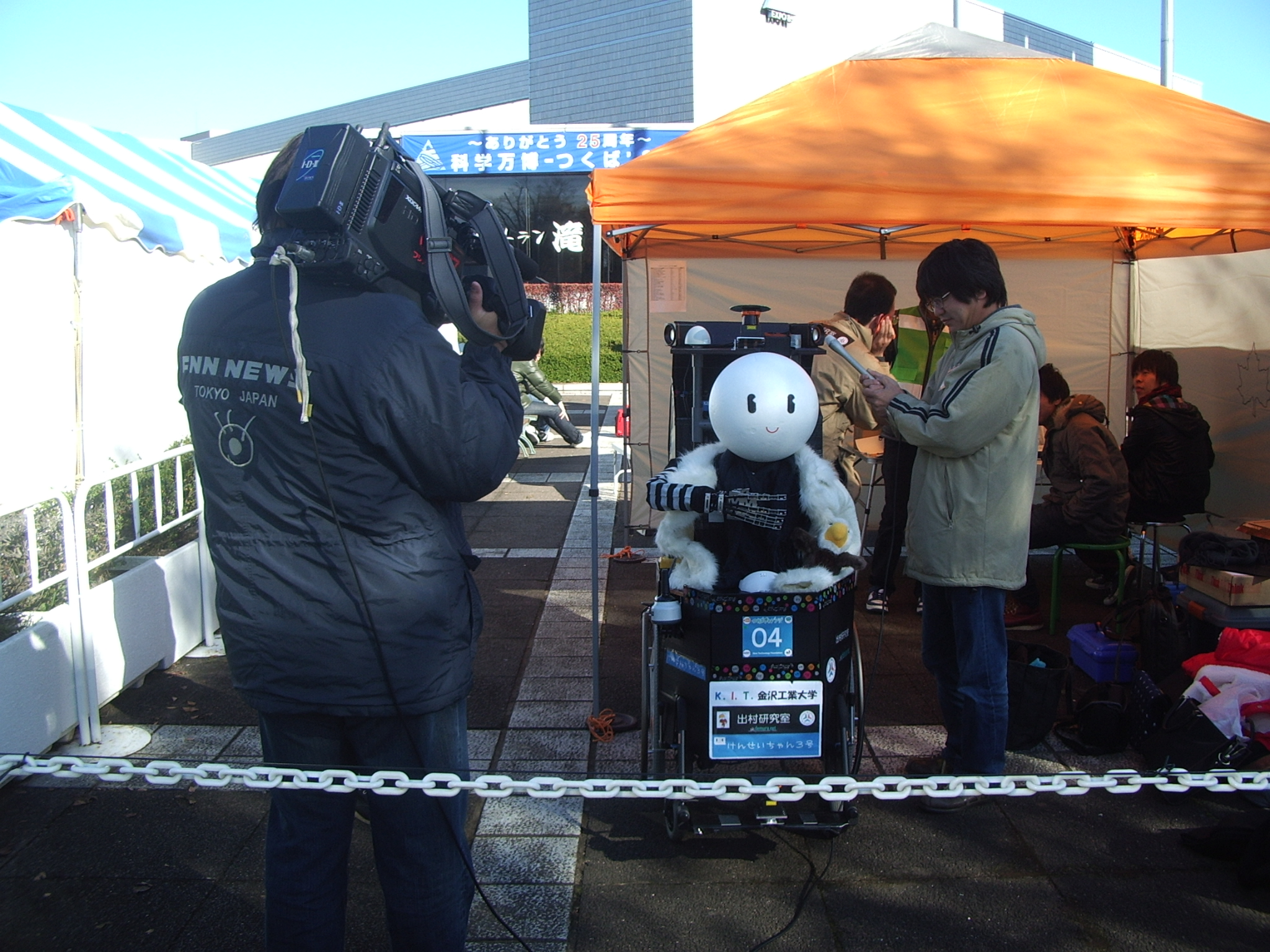
2010年11月19日は、つくばチャレンジ2010のファイナル走行でした。21番目に出走したdemura.netチームのけんせいちゃん3号機は出走前のパフォーマンスをほぼ完璧にこなし観客の笑いを誘います。昨年は、人形を搭載させたたけでしたが、なにげない「動かないの?」というロボット開発者殺しの言葉に苦悩し、ヒューマノイド化を進めました。
学部4年イケポンの努力により片腕が完成。パフォーマンスでは徹夜明けのロボットオペレータに清涼飲料水レッドブル(実はDarpa Urban Challengeのスポンサー)の缶を掴んで渡すという関係者にしか伝わらない細かい芸を披露。さらに、チーム紹介のあと、早稲田大学チームにインスパイヤーされ「GPS FIX, GPS Float いってみただけ」、あるいは走行中にも「パーティクル撒いてあげる♪ 収束しないけど♪」という開発者泣かせのコメントを連発。観客の心を和ませました。ロボットの発話に関しては学部4年サカタンが担当しました。私は一切関知しておりません...
さて、ファイナル走行の結果は262mでリタイア。トライアルのゴール地点を通過し、約20m程度進んだところ、コース右の段差に前輪がはまり脱出不能になりリタイアしてしまいました。実験走行でも同じところで失敗していただけに、その付近のウェイポイントを左に2mずらしてファイナルに臨みましたが同じ結果になり予想外でした。
練習の実験走行で1度も完走していなかったので、完走は難しいと予想していましたが、公園を抜け、美術館の前ぐらいまでは走行する予定でしたのでとても残念な結果となりました。
昨年は145mでリタイア、今年は262mまで自律走行したので2倍程度、走行距離が伸びています。トライアルコース(約240m)に関しては7回連続して成功(昨年は2回)したので技術レベルは着実に向上しています。なお、トライアルコースに関しては、自己位置補正はしておらず、デッドレコニングだけでの走破です。職人さんの絶妙なウェイポイント設定能力のおかげです。もちろん、ただのデッドレコニングだけでは不可能なのでいろいろな工夫はしています。これについては、SI2010で発表する予定です。
来年もつくばチャレンジは開催されるということなので、今年のリベンジを果たします。

けんせいちゃん3号機 トライアルゴールを抜け、リタイヤ直前の場面
最後に、demura.netティームのメンバーとその担当を紹介します。
- デム (下写真。後列左端): 総括, GUI,通信担当、走行責任者
- M2:イッチ― (後列左から2番目。ピースサイン): ナビゲーション、障害物回避、ロボットビジョン担当
- M2:ホッピー (後列左から3番目。マフラー着用): 地図生成担当
- M1:コモリン (後列左から4番目。ファイナルボード保持): マップマッチング、自己位置担当、オペレーター
- M2:オジサマ (後列右端。帽子着用): デッドレコニング一筋のウェイポイント職人、オペレーター
- B4:サカタン (前列左。グッドサイン): ロボット外装、ロボット発話担当、安全管理責任者
- B4:イケポン (前列右.握手): ロボットハードウェア、電装系担当。けんせいちゃん3号機の右腕(ikeda hand) 開発。安全管理責任者

demura.netティーム 2010年のメンバー

コメント
お疲れさまでした。ファイナルの日は見に行けませんでしたが。262mだったんですね。
トライアルの距離が延びて、ハードル上がっていて、自分にはクリアでるのか~?って感じです。
ってその前にロボット開発に戻れる体制にしたい。
かみやんさん,
コメントありがとうございます.
リタイアした地点は,前日のトライアル後の走行でも前輪がはまったところだったのでウェイポイントをずらして回避しようとしましたがだめでした.あの付近ではマップマッチングの精度がでなかったことがリタイアの原因です.
来年のつくばチャレンジは開催されるそうなので,今年のリベンジを果たしたいと思います.ファイナル走行を完走できませんでしたが,とても楽しく有意義でした.
でむ