○ 連絡事項
- レポート再提出
- 〆切日時:2月9日(月)昼12時
- 提出場所
紙:21号館4階教員控室前出村レポート入れ
メール:〆切日時までに出村へ送付すること
- 休講:11月14日(金)→補講:11月27日(木) 5限
- 3週の簡単なプラグインの最終課題提出日を10月31日(金)授業開始前とします。
- GAZEBO:簡単なプラグインプログラミングのhello_world.ccのソースコードに全角空白が含まれていたのでコンパイル時にエラーになるというバグがありました。修正しました。
- C++言語の本を所有していない学生は以下を購入してください。第3版でもかまいません。
- やさしいC++第4版, 高橋麻奈著、SB Creative, 2808円
- 休講:10月24日(金)1限→補講:10月9目(木)5限8-401
○ 授業内容
- 1週目:オリエンテーション
- 2週目:開発環境の設定
- 3週目:GAZEBO初体験
- 4週目:CとC++の小さな違い12選(PPT, 学内のみ)
- ホームワーク:PPTの宿題にある12のオリジナル例題を作り、ソースコードと実行結果をA4用紙に印刷して提出すること。やった問題数を赤字でレポート1枚目の右上に書くこと。C++言語のみでOKです。
- 提出日:10月31日(金)授業開始前に教卓に置く
- 5週目:やさしいC++(L12 クラスの基本、3 クラスの機能)
- 6週目:やさしいC++(L14 新しいクラス)
- 7週目:車輪型ロボット
- 8週目:GAZEBO演習
- 9週目:GAZEBO演習
- 10週目:ロボットアーム(順運動学)
- 11週目:ロボットアーム2 (逆運動学)
- 12週目:4脚ロボット (歩行制御)
- 13週目:4脚ロボット (サンプルコード説明)
- 14週目:総合演習1 建物モデルファイル
- 15週目:総合演習2
- 16週目
- プチプロジェクト発表会
- タイピング実技試験
- 自己点検・授業アンケート
〇 レポート: (注)他人のレポートやプログラムを写すとカンニング行為になり、後学期履修中の科目が全部不合格になります。
- レポ-ト1:車輪型ロボット
自己位置同定の式を次の2通りの方法で導出しA4レポート用紙にまとめて提出しなさい。プログラムを実装した学生は、プログラム提出方法に従い提出すること。なお、手書きで導出過程を省略せずに必ず書くこと。結果だけは点数になりません。
提出期限:12月19日(金)講義のチャイムがなる前
(1) 3個の円の交点を求める方法
(2) 2つの円の交点を通る直線を使う方法
評価基準(レポートや中身が悪いとその評価になりません)
S:どちらか1つを実装して評価。
A:(1), (2) 両方を導出。
B: どちから1つを導出。 - レポート2:ロボットアーム
以下をまとめレポートとして提出しなさい。レポートにはソースコードと実行結果のスクリーンショットを載せ、説明もすること。
(1) 運動学
アーム先端に位置センサを取り付る。運動学の計算結果と位置センサの出力を比較し、プログラムが正しいか確認する。
(2) 逆運動学
逆運動学を実装する。2自由度の場合は解が2つあるので、数字キー1を押すと解1、数字キー2を押すと解2を選択するにしなさい。
提出期限:1月9日(金)講義のチャイムがなる前
評価基準(レポートや中身が悪いとその評価になりません)
S:両方を実装して評価。
A:どちらか片方を実装して評価。 - 最終レポート:Virtual FMT Challenge
提出期限:2月6日(金)講義のチャイムがなる前に紙(A4)とメールを添付して提出すること。
チャレンジ実現までの一連手順をレポートにまとめること。必ず、実験結果(評価:走行距離)とプログラム実行の方法(コマンド)を掲載すること。
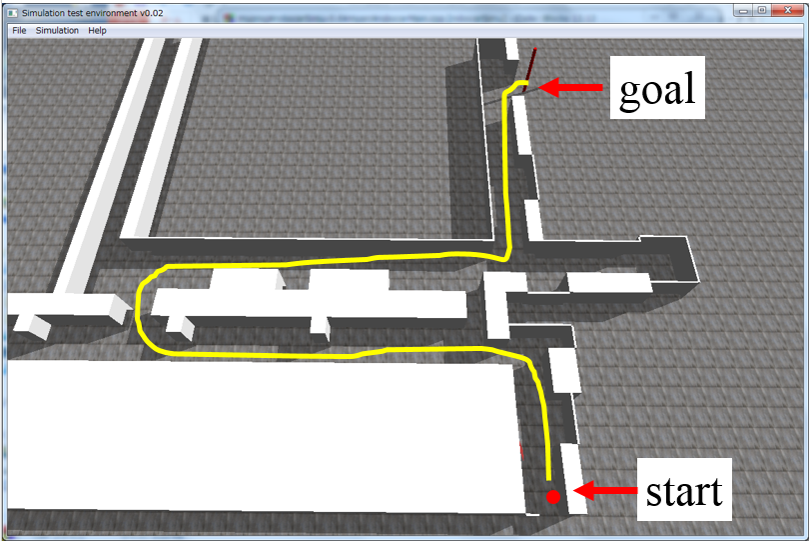
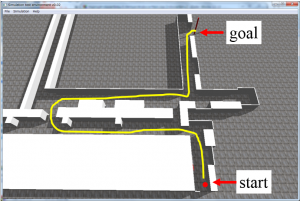 目的: スタート地点からゴールを目指す
目的: スタート地点からゴールを目指す
評価:走行距離(ゴールまで近い方がよい)
条件
(1) LIDARを使用すること(使用しない場合は最高C評価)
(2) ロボットモデルはオリジナルを使用すること
(3) 自己位置推定にシミュレータの絶対座標位置を取得する関数の使用不可。ただし、走行距離を取得するためには使用してよい。 - 最終レポートのプログラム提出方法
以下の4点を添付してメールで送付してください。なお、送ったものがコンパイル、実行できるか必ず確認すること。それらができないと点数になりません。- コメント入りのソースコード:ディレクトリ毎圧縮して、ファイル名を3ERクラス番号.tgzとすること。圧縮にはtarコマンドを使うこと
$ tar cvzf 3ER1001.tgz 圧縮するディレクトリ名 - モデルファイル。ファイル名は変更しないこと。
- ワールドファイル。1のディレクトリに入っている場合や使っていない場合は必要なし。
- レポートのワードファイル以下のフォーマットのメールを送ること。
件名:ロボットプログラミング2:レポート番号 クラス-番号 氏名
例 ロボットプログラミング2:レポート1 3ER1-1 工大太郎
添付ファイル名: 3ERクラス番号-レポート番号.tgz
例 3ER1001-3.tgz, 3ER2030-4.tgz (クラス番号は4桁)
- コメント入りのソースコード:ディレクトリ毎圧縮して、ファイル名を3ERクラス番号.tgzとすること。圧縮にはtarコマンドを使うこと
〇 タッチタイプ(10点)
- 実技試験日:2月6日(金)1限
- 注意:タイピングも基本が大切です。正しい指の使い方をマスターしないうちにランキングに挑戦しても無意味です。キーボードを見ない、ホームポジションから指を離さない、打鍵する指とキーの対応を守るなど基本に忠実にタイプしましょう!
- 練習・試験用:
- 試験用
- 学外からこのサーバーにアクセスしたい場合は,情報処理サービスセンターの各種サービスのページをご覧ください.
ランキングに挑戦しましょう。1分間 200打鍵が合格基準6点、250打鍵が満点10点です。登録の際は、氏名とクラス番号を必ず入力してください。入力しない記録は削除します。