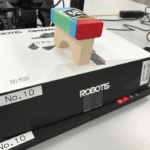
実習3のデモプログラムarm_demo2024_ros2.pyを参考に積み木を積むピック&プレースのプログラムを作り,リアルロボットを使って積み木を2段重ねよう.
条 件
- 積み木の初期位置は任意とする.ただし,事前に積み重ねないこと.
- 積み木の種類は指定なし.好きななものを使って良い.
- 積み木の姿勢は低い姿勢.高さ2cm.つまり,積み木の収納箱に入る高さにすること.
以上
 education
education実習3のデモプログラムarm_demo2024_ros2.pyを参考に積み木を積むピック&プレースのプログラムを作り,リアルロボットを使って積み木を2段重ねよう.
条 件
以上






 Users Today : 16
Users Today : 16 Users Last 30 days : 810
Users Last 30 days : 810 Users This Year : 810
Users This Year : 810 Total Users : 8722461
Total Users : 8722461 Views Today : 16
Views Today : 16 Who's Online : 1
Who's Online : 1
コメント