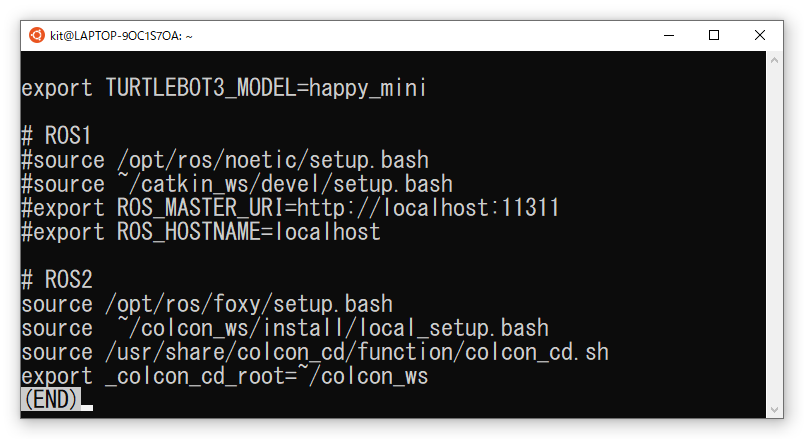
授業では科目によりROS1とROS2を使っているので,環境の切り替えが必要になります.ROS1とROS2で以下のコマンドを最低,実行する必要がありますが,普通は毎回,打ち込むのは面倒なので.bashrcに書く場合が多いです.その場合,ROS1を使うときはROS2のコマンドをコメントアウト(コマンドの前に#をつけてコメント化すること),ROS2を使うときはROS1をコメントアウトしなけれエラーになります.
# ROS1 source /opt/ros/noetic/setup.bash source ~/catkin_ws/devel/setup.bash # ROS2 source /opt/ros/foxy/setup.bash source ~/colcon_ws/install/local_setup.bash
.bashrcを編集してROS1とROS2の環境を切り替えるのが面倒な方はaliasを作ったり,シェルスクリプトを書いたりしてもよいでしょう. Yutaka Kondoさんが環境を切り替えるパッケージを作られています.
“ROS1,ROS2, 環境変数,変更”などと検索すればいろいろ見つかるので,お好きなものをどうぞ!
コメント