WSL (Windows Subsystem for Linux)で授業のROS教材が動かないので、来年には正式にリリースされるLinuxが完全に動くWSL2試してみる。WSLでは動かなった授業のROS教材も問題なく動いた。この記事はそのメモ。なお、現時点(2019-10-25)ではWSL2とVirtualBox、VMwareは共存できないので注意。
Windows 10のPreview版をインストールしないとWSL2は使えないので、今年度の授業には使えないが、来年度にはリリース版でも動くので使えるだろう。
なお、WSL2のインストールはMicrosoftの以下の記事に従い作業した。
まず、ビルド18917以降にするためにWindows Insiderプログラムに参加する。
- 以下のリンクからWindows Insider Programに登録する。
- Windows Insider Programの設定を行う。
- スタート → 設定 → 更新とセキュリティ → Windows Insider Program
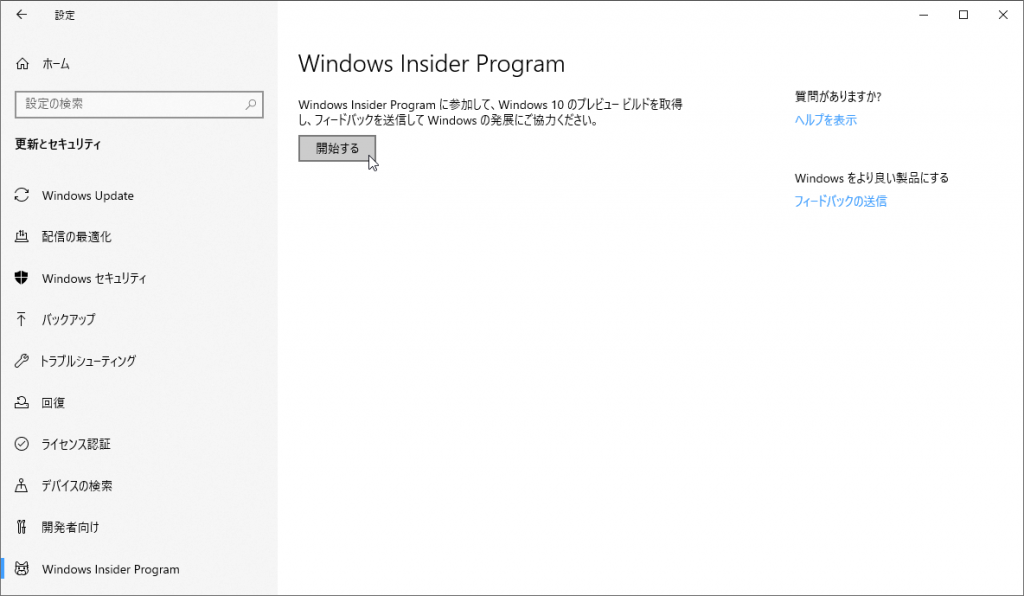
- 「Windows Insider Programに参加して、Windows10のプレビュービルドを取得し、フィードバックを送信してWindowsの発展にご協力ください。」と聞かれるので「開始」をクリック。
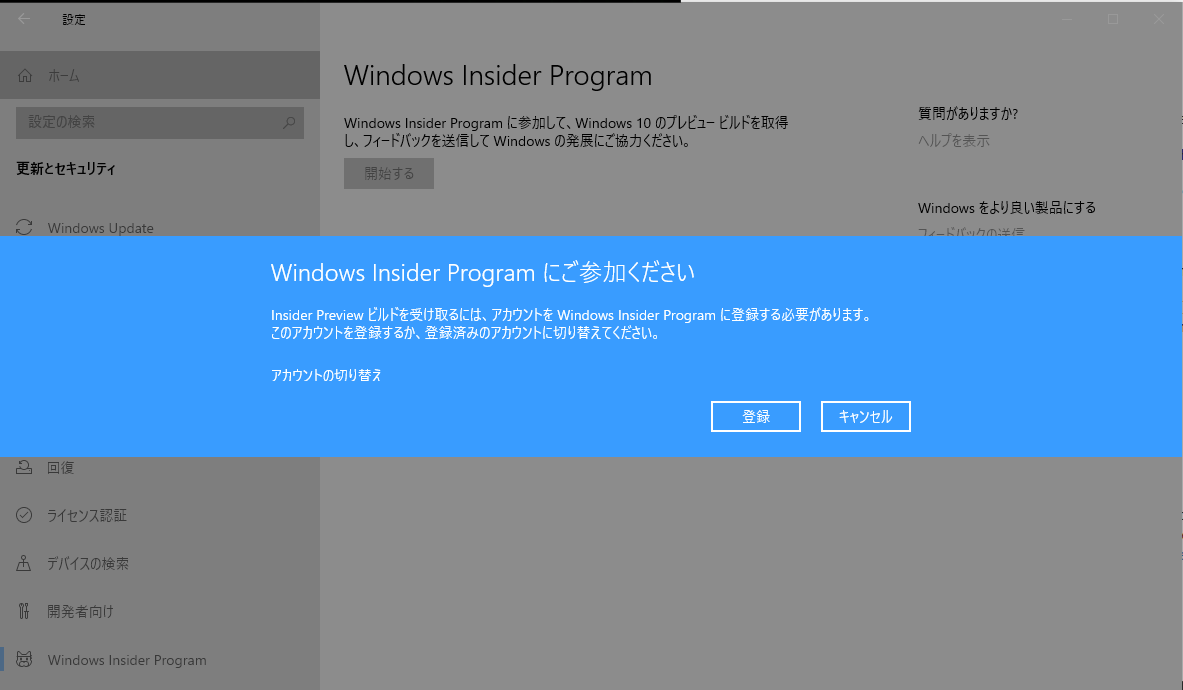
- 「Windows Insider Programにご参加ください」と聞かれる。アカウントを切り替えたい場合は「アカウントの切り替え」をクリックする。そのままでよい場合は「登録」をクリック。
-
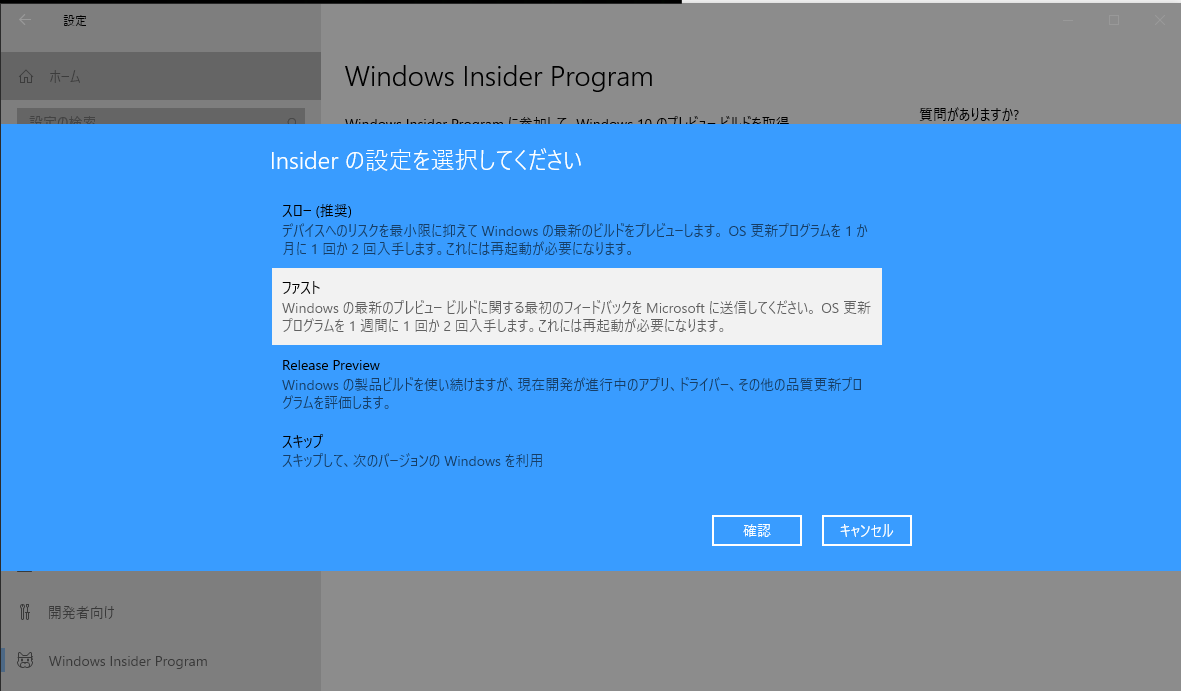
- 「Insiderの設定を選択してください」と聞かれるので、「ファスト」を選択し、「確認」をクリックする。
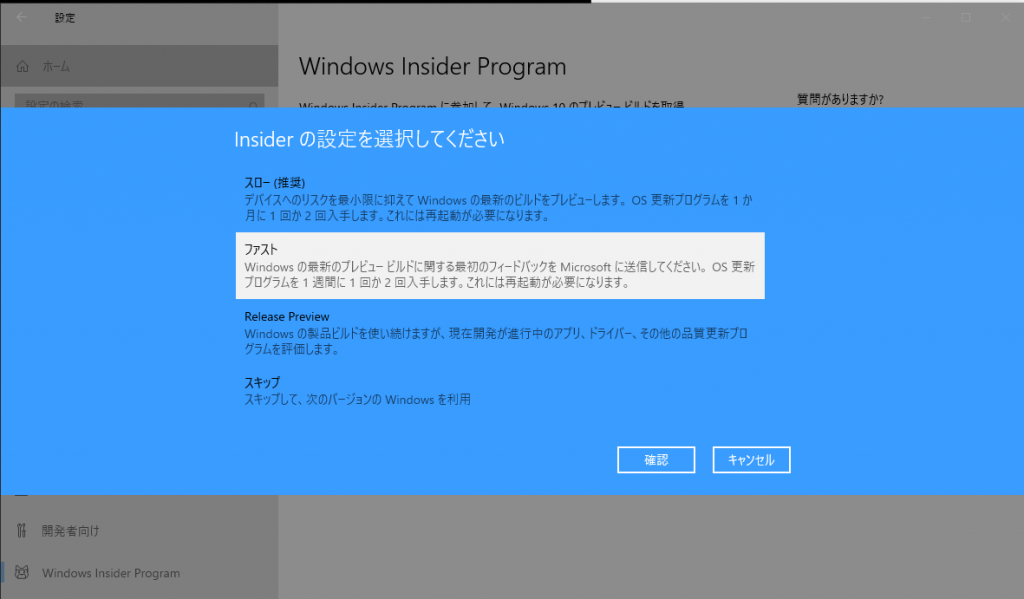 する。WSL2をインストールまでは「ファスト」にして、インストール後は「スロー」にする。そうしないと、OS更新プログラムが1週間に1,2回入手し、再起動が必要になるので仕事に支障が出るかもしれない。
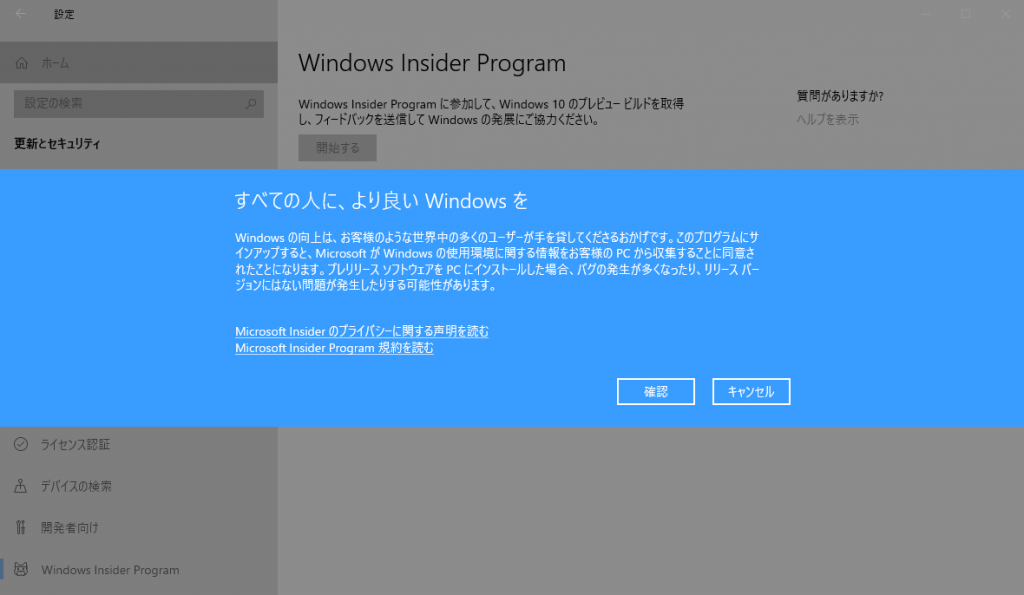
する。WSL2をインストールまでは「ファスト」にして、インストール後は「スロー」にする。そうしないと、OS更新プログラムが1週間に1,2回入手し、再起動が必要になるので仕事に支障が出るかもしれない。 - 「すべての人に、より良いWindowsを」と聞かれるので「確認」をクリック。
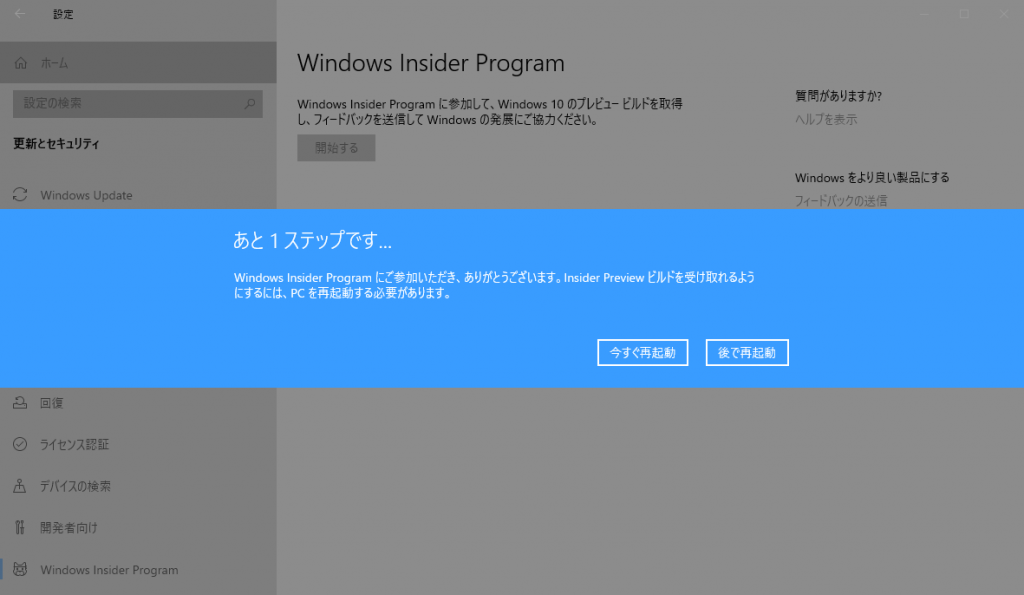
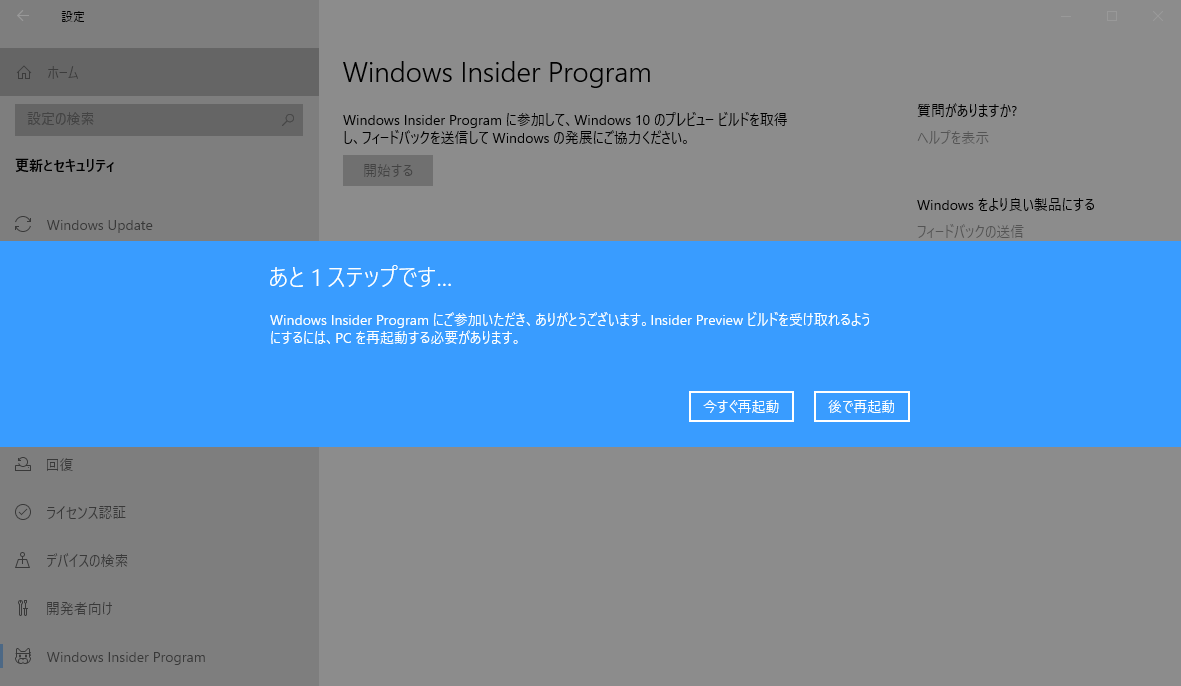
- 「あと1ステップです。。。」と聞かれるので「今すぐ再起動」をクリックする。
- 「Insiderの設定を選択してください」と聞かれるので、「ファスト」を選択し、「確認」をクリックする。
- Windows Preview版のインストール
- 再起動したら、以下を実行する。
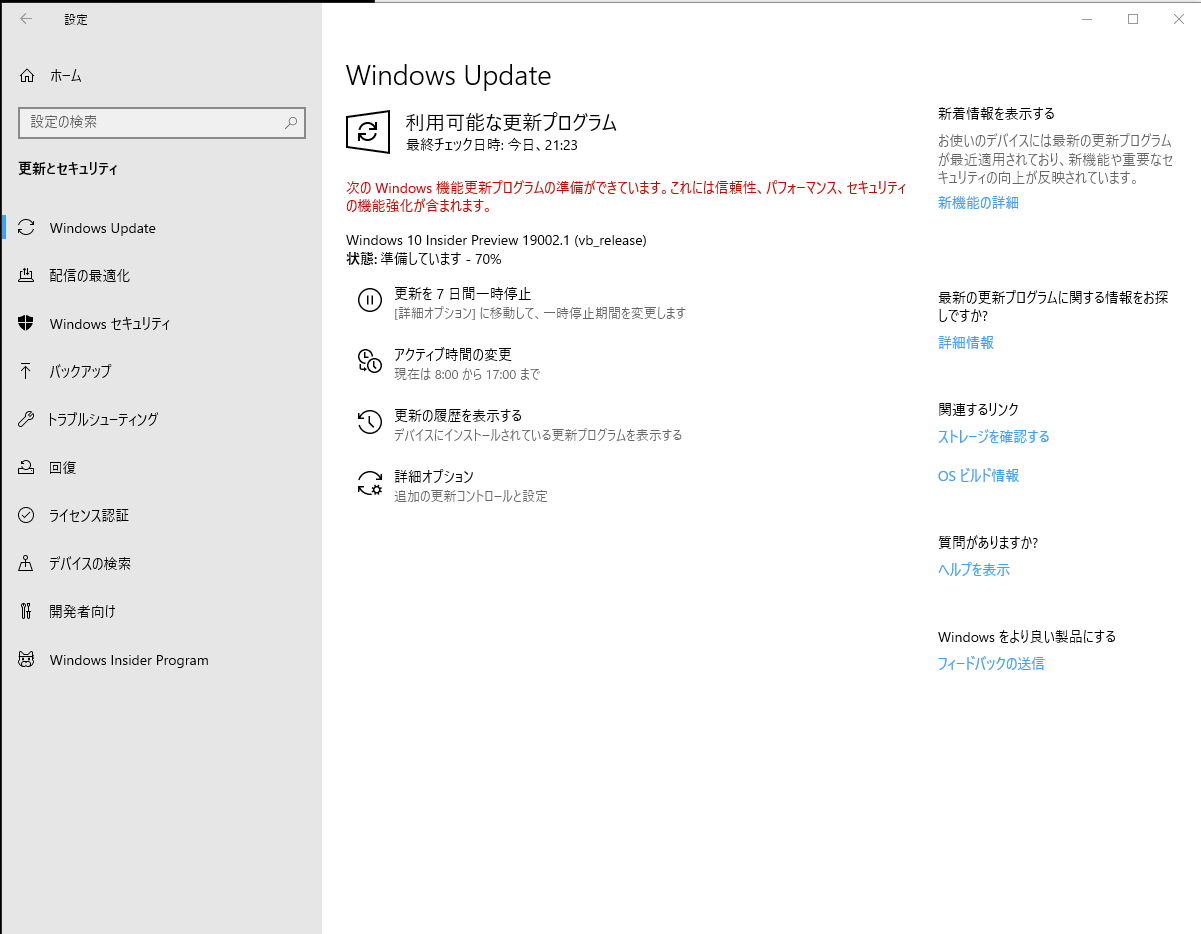
- スタート → 設定 → 更新とセキュリティ → 更新プログラムのチェック
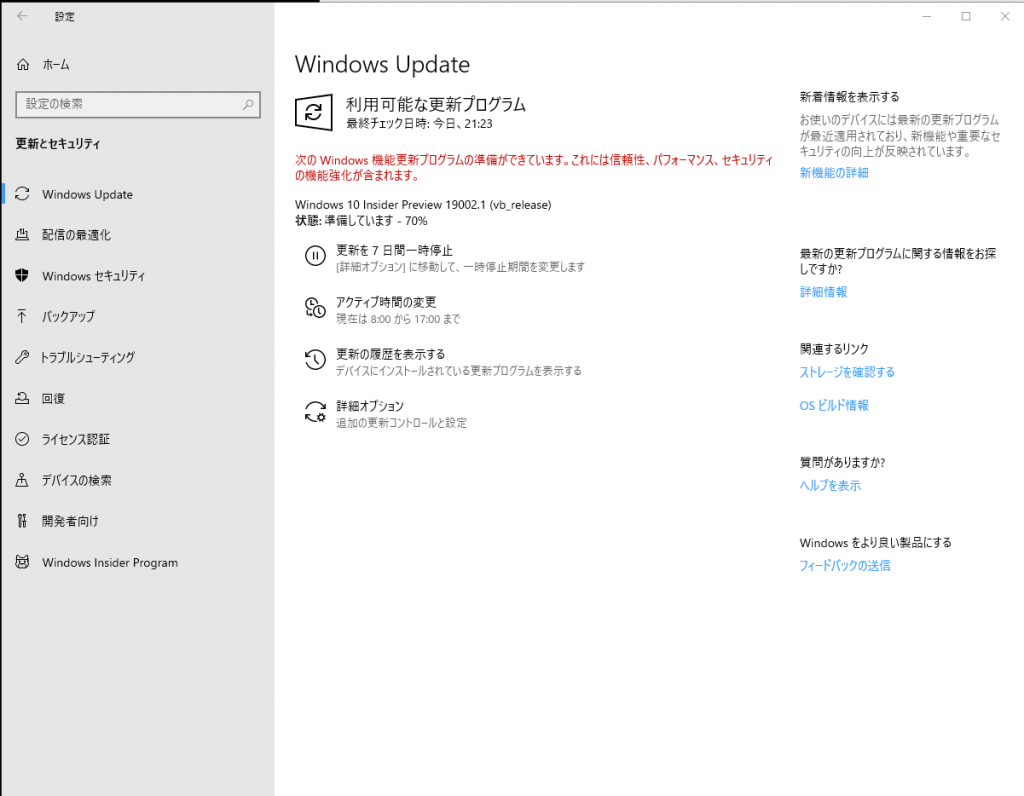
- 利用可能な更新プログラムとして、Windows 10 Insider Previewが表示される。ビルド 18917ならWSL2をインストールできる。この場合はバージョン19002.1だった。
- 更新して以下の手順でバージョンをチェックする。OSビルドが18917以上ならよい。
- スタート→設定→システム→バージョン情報
- 再起動したら、以下を実行する。
- 仮想マシンプラットフォーム ‘ オプションのコンポーネントを有効にし、WSL を有効にする。
- 管理者権限でPowerShellを開き以下のコマンドを実行する。PowerShellを開くのはスタートメニューからWindowsPowerShellを選び、右マウスボタンをクリックして「管理者として実行する」を選ぶ。
- Enable-WindowsOptionalFeature -Online -FeatureName VirtualMachinePlatform
- Enable-WindowsOptionalFeature -Online -FeatureName Microsoft-Windows-Subsystem-Linux
- 再起動するかと聞かれので「Y」キーを押して再起動する。
- 管理者権限でPowerShellを開き以下のコマンドを実行する。PowerShellを開くのはスタートメニューからWindowsPowerShellを選び、右マウスボタンをクリックして「管理者として実行する」を選ぶ。
- WSLとUbuntu-18.04のインストール
- WSLとWSL2は共存できて、Ubuntuのインストールとも別なので以下のリンクに従ってWSLとUbuntu-18.04をインストールした。
- WSL2の設定
- 管理者権限でPowerShellを開き、次のコマンドを実行する。
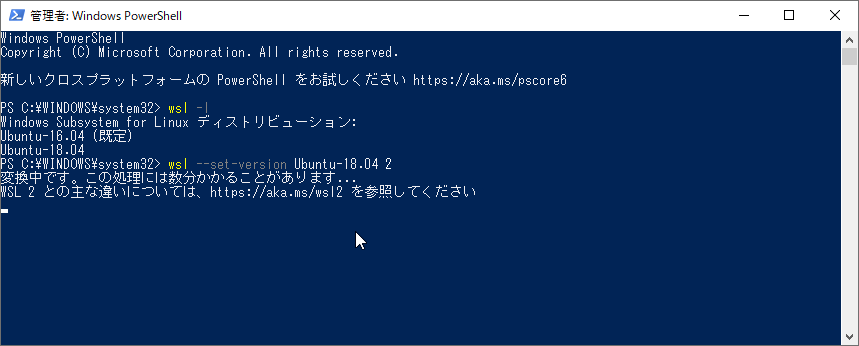
- wsl -l
- 僕の環境では、Ubuntu-16.04、Ubuntu-18.04が既にインストールされている。次の困んでUbuntu-18.04をWSL2に設定する。
- wsl –set-version Ubuntu-18.04 2
- wsl –set-version Ubuntu-18.04 2
- 次のコマンドで、設定を確認する。Ubuntu-18.04が次のようにVERSION 2になっていればよい。
- wsl –list –verbose

- wsl –list –verbose
- 管理者権限でPowerShellを開き、次のコマンドを実行する。
- ROS Melodicのインストール
- 以下のリンクに従ってROS Melodicをインストールした。
- ROS での動作確認
- Windowsのデスクトップで右マウスボタンをクリックして、NVIDIAコントロールパネルを選択し、「優先するグラフィックスプロセッサ」に「高いパフォーマンスNVIDIAプロセッサ」に設定する。
- VcXsrvを以下の設定で起動する。
- Select display settingsウインドウ
- Multiple windowsにチェックを入れ、「次へ(N)」をクリックする。

- Multiple windowsにチェックを入れ、「次へ(N)」をクリックする。
- Select how to start clientsウインドウ
- Start no client にチェックを入れ、「次へ(N)」をクリックする。

- Start no client にチェックを入れ、「次へ(N)」をクリックする。
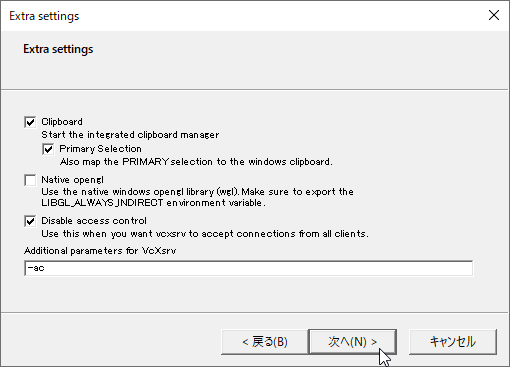
- Extra settingsウインドウ
- Clipboard、Primary Selection、Disable access controlにチェックを入れる
- Additional parameter for VcXsrvに”-ac”を入力して、「次へ」をクリックする。
- Configuration completeウインドウ
- 「完了」をクリックするとVxSrvが起動する。
- 「完了」をクリックするとVxSrvが起動する。
- Select display settingsウインドウ
- ROSでの動作確認
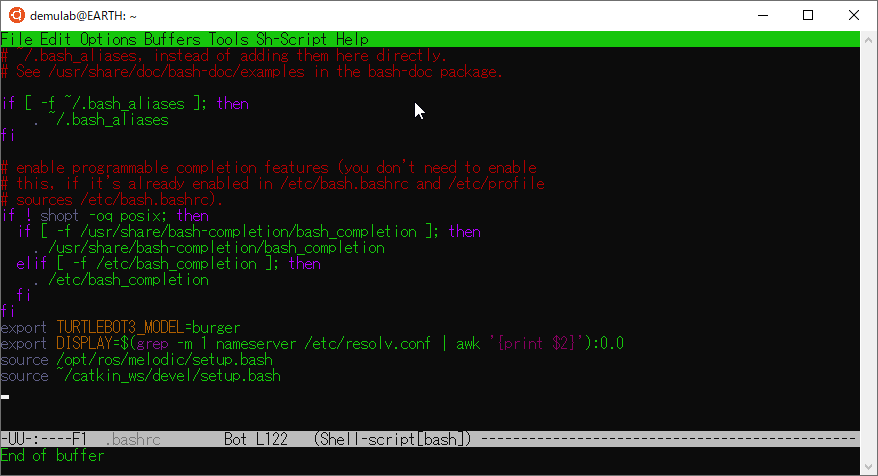
- Ubuntu18.04LTSアイコンをクリックして端末を開き、.bashrcをgeditなどのエディタで以下の4行をファイルの最後に追加して保存する。特に、DISPLAY環境変数がlocalhostでは動かないので注意。
export TURTLEBOT3_MODEL=burger
export DISPLAY=$(grep -m 1 nameserver /etc/resolv.conf | awk '{print $2}'):0.0
source /opt/ros/melodic/setup.bash
source ~/catkin_ws/devel/setup.bash
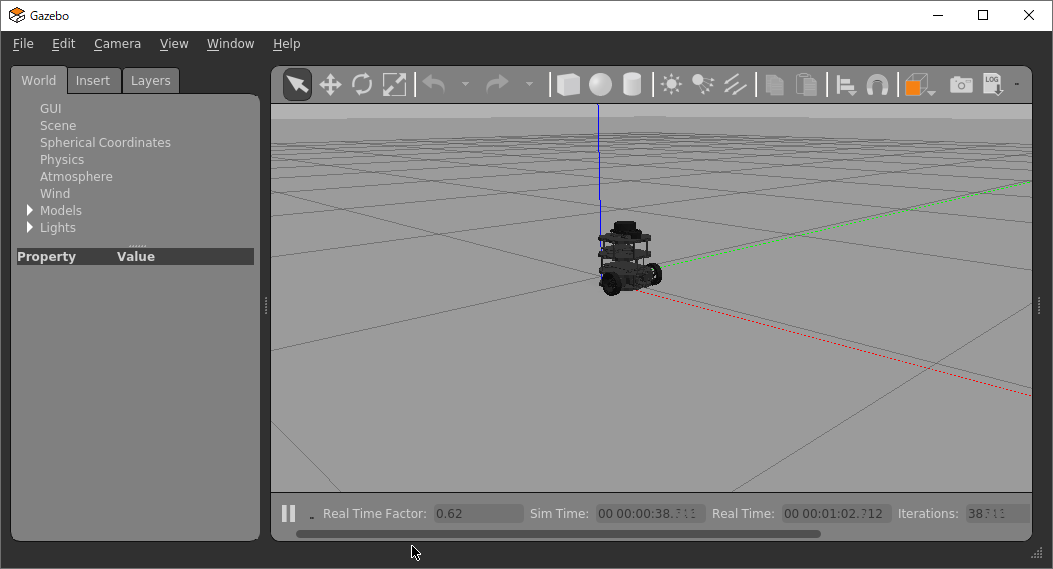
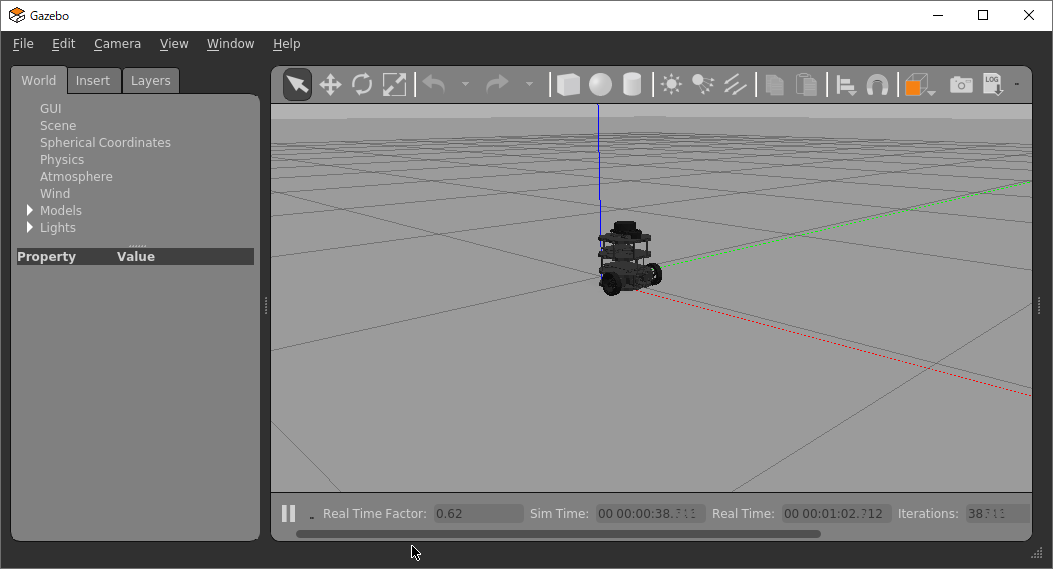
- WSLでは動かなかった以下のGazebo上のTurtlebot3をキーボードで動かすサンプルを試す。デスクトップにあるUbuntu18.04LTSアイコンをクリックして端末を開き、以下のリンクを実行して動作を確認した。私の環境ではWSL2では問題なく動作した。めでたし!めでたし!
- Ubuntu18.04LTSアイコンをクリックして端末を開き、.bashrcをgeditなどのエディタで以下の4行をファイルの最後に追加して保存する。特に、DISPLAY環境変数がlocalhostでは動かないので注意。

終わり

コメント