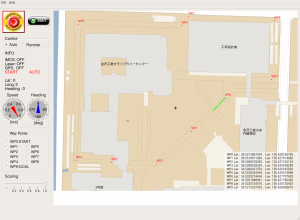

A Tukuba Challenge Control Panel Ver.09-08-22。クリックすると拡大します。
つくばチャレンジに参加してみて、ロボットのGUIがとても大切だということがわかりました。試走会は時間が限られていますし、他のロボットも走行しているのでコース上でじっくりプログラミングというわけにもいきません。そのため、現場ではプログラミングをせずにできるだけGUIの操作だけで済ませることができれば楽できます。GUIのイメージとしてはカーナビです。
夏休みはもう終わりですが、少し時間を取れたのでQtの勉強がてら上図のようなGUIを作成してみました。主な機能は次のとおりです。
- 情報表示
- 地図、ウェイポイント
- ロボットのデバイス状態
- GPSの緯度・経度、ロボットの現在位置、速度、針路
- 操作
- 地図の縮尺変更、ウェイポイントの設定
- 金沢とつくばの地図切り替え
- マウスによる地図の移動
- ロボットのスタートとストップ
- ロボットのリモコン、自律動作の切り替え
来週にでもこれでロボットを動かしてみて改善していく予定です。
でむ

コメント