
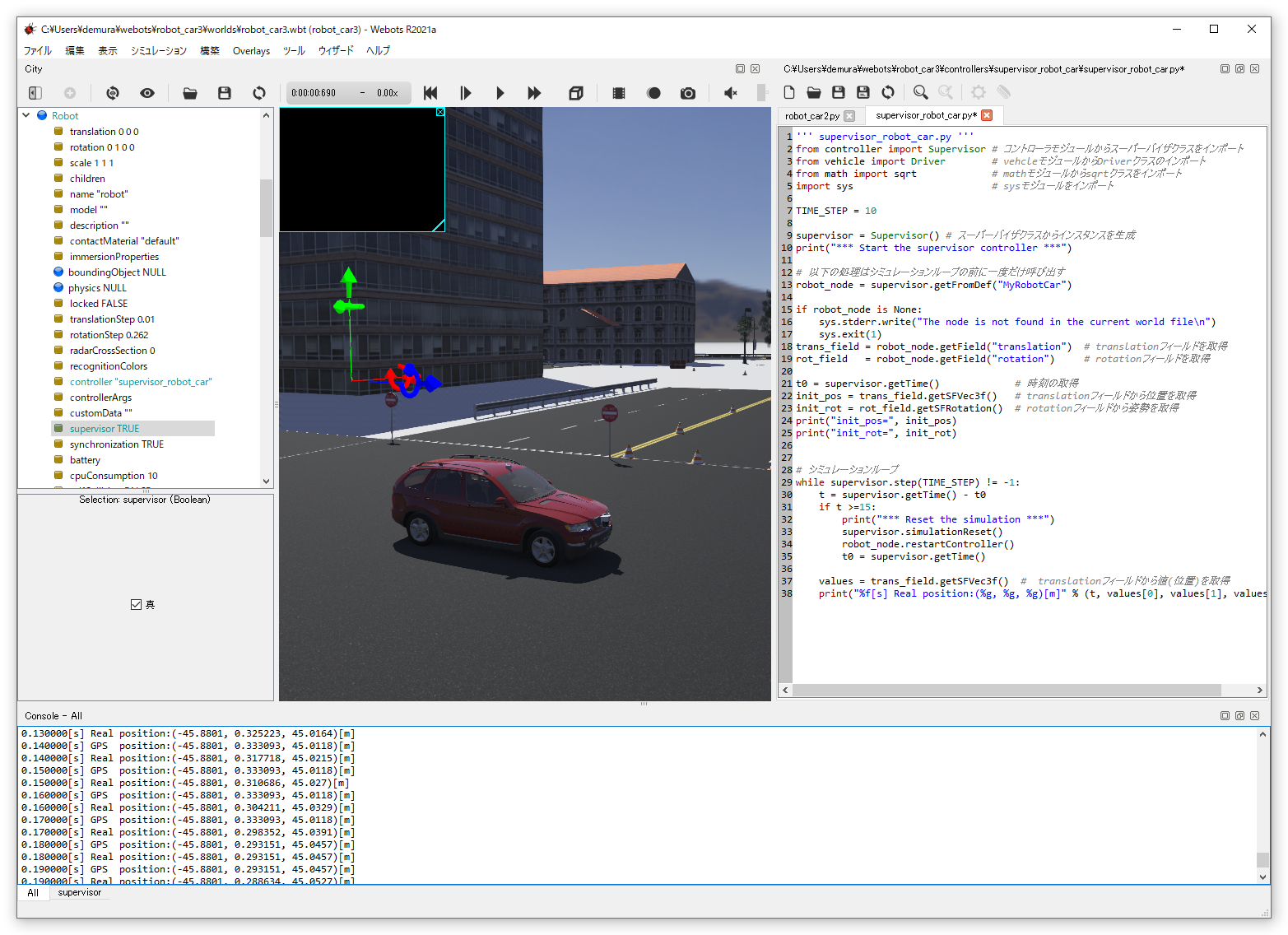
このページは金沢工業大学大学院機械工学専攻ロボット知能工学特論のサポートページです。第12週はWebotsの自動運転シミュレータに,カメラを使いコース中央にある黄色ラインを追従する制御プログラムとLIDARを使った障害物回避を実装します.
レファレンス
ハンズオン
- 次の記事に従って順番にハンズオンを進めてください.デッドレコニングの実装がファイナルプロジェクトの中間マイルストーンになります.
終わり
education
このページは金沢工業大学大学院機械工学専攻ロボット知能工学特論のサポートページです。第12週はWebotsの自動運転シミュレータに,カメラを使いコース中央にある黄色ラインを追従する制御プログラムとLIDARを使った障害物回避を実装します.
レファレンス
ハンズオン
終わり

コメント