The happy mini team (former demura.net) official web site
News: Happy mini, our human support robot, is the 3rd place in sympathy and 5th place in design rating in the @Home league in RoboCup2016 Leipzig by the research of Eva Jahn as shown in this web site. Many wonderful robots, such as Pepper, HSR, R1, SocRob, Amigo, Tiago and so on, participated in RoboCup@Home2016.
- Vision
The happy mini team, our former team name was demura.net, has been participating in the RoboCup@Home league of the RoboCup Japan Open since 2012, and participated in the RoboCup 2015 and 2016 world competition. The team got the 9th and 8th places in the competition, respectively.
The vision of the happy mini team is “Making the World Happy by Making a Kawaii Robot.” “Kawaii” means cute, lovely, or charming. We think that the kawaii robot can solve problems of an aging society in Japan, robots in the RoboCup@Home league should be more kawaii. Happy Mini as shown in Fig.1 is designed in the image of a little child with a lively yellow color. Happy Mini is considered to be the first kawaii designed robot in the RoboCup@Home. The software system was based on ROS, and the state of arts frame works such as Caffe, Darknet, Digits, Hark, Kaldi and so on.
- Robot
(1) Hardware
We have been developing 2 kinds of human support robots. One is a childcare robot for children and another is a wheelchair robot for the elderly. To foster the research and development, the Demura Research Laboratory has been participating in RoboCup@Home since 2012 and Tsukuba Challenge since 2008.
The design concepts of Happy Mini are Kawaii (lovely, cute), simplicity, safety, and usability. Kawaii is the most important aspect of human-robot interaction for Mini. Mini is an infant robot, and the ability is limited as well as other robots in RoboCup. So, Mini needs the help of human, that is why kawaii of appearance and voice is crucial for Mini. The exterior of Mini is roundish and lively yellow as shown in Fig.1. The technical information of these robots is described in our team description paper(TDP2017HappyMini-final-0312-2314).
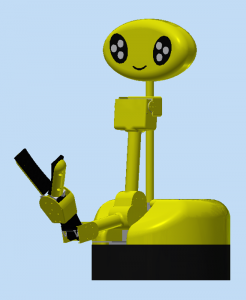

Fig.1 Happy Mini (Left: CAD design, Right: Real robot)
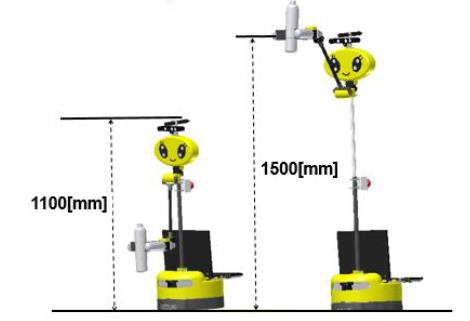
Fig.2 Extendable Torso
| Happy Mini | |
| Height [m] | 1.10~1.50 |
| Width [m] | 0.32 |
| Length [m] | 0.32 |
| Weight [kg] | 10.0 |
| Max speed [m/s] | 0.7 |
| D.O.F | 5 |
(2) Software
Perception: The software system is based on ROS and Caffe. Several algorithms are used for an object and human face recognition. HaarCascade classifier, Flat Clustering filtering, and Deep Neural Networks (DNNs) are used for face recognition (Fig.3). Nesterov’s accelerated gradient and Convolution DNNs are used for gender classification. We trained the network using 700 samples for each category, and accuracy of classification is about 75 %.
The real-time object detection deep neural newtork, YOLO (You only look once) is used for person detection as shown in Fig.4. The algorithm is very fast compared to other DNNs and robust.
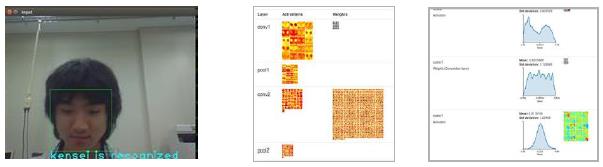
Fig.3 Face recognition using HarrCascade and DNN
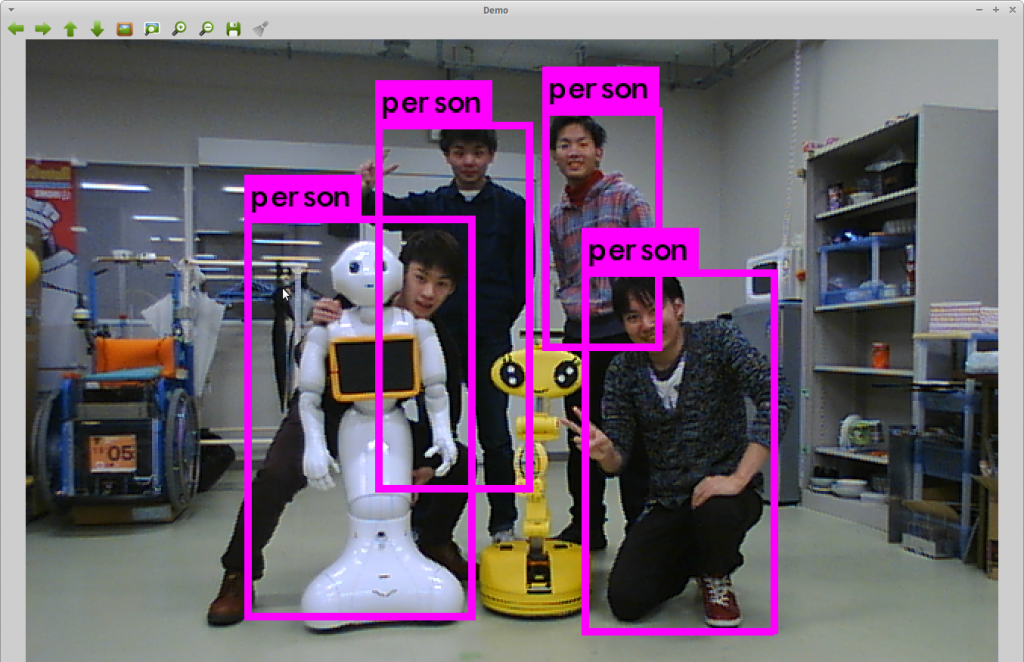
Fig.4 Person detection
Speech Recognition and Sound Localization: We have developed a speech recognition and a sound source localization system. The speech recognition system uses the Kaldi based gstream server. It is a real-time full-duplex speech recognition server, and
uses a DNN-based model for English trained on the TEDLIUM speech corpus.
The sound source localization system is implemented using the robot auditory library HARK. The HARK easily be programmed by GUI as shown in Fig.5. The system takes multi-channel speech waveform data from the 8ch microphone array, calculates FFT and estimates the sound source direction by the MUSIC method.
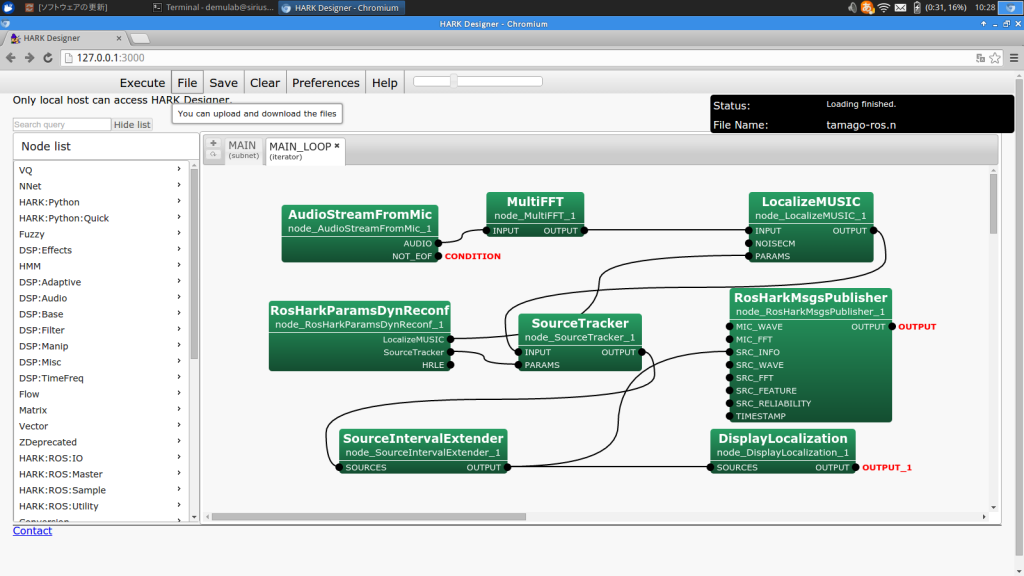
Fig.5 HARK
Simulator: We have developed the Happy Mini simulator using the Gazebo robot simulator as shown in Fig.6. To make the 3D Happy Mini model in the simulator, we described the URDF (Universal Robot-ics Description Format) file and imported 3D meshes from the 3D CAD data. MoveIt! is easily applied to the 3D model described by the URDF
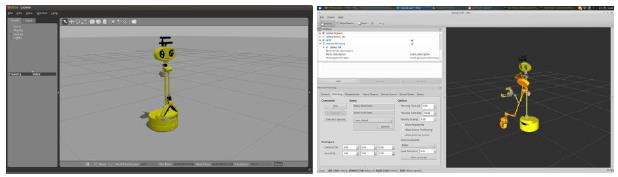
Fig.6 The Happy Mini Simulator using Gazebo
- Scientific achievements
Picture book reading: In the globalized modern society, the importance of acquiring English from early childhood is recognized. It is considered important to read a picture book in English. However, few Japanese speak English fluently. Thus, we have been developing a picture book reading application for children. We think that is one of the killer applications for a domestic service robot. Fig.7 shows our demonstration of picture book reading in RoboCup2016. We are planning to test the picture book reading application using Happy Mini in a real kindergarten.

Fig.7 Picture book reading demonstration in RoboCup2016
Road unevenness detection: We have been developing a wheelchair robot and a driver assist technology system for the elderly. The conventional wheelchair is difficult to get over small difference (about 30 [mm]) in level, and it sometimes makes a falling accident. To prevent the accident, the capability of detecting the small difference is required. We have developed two system to solve the problem.
The first system uses the Kinect V2 sensor as shown in Fig.8, and the second system uses the 3D Rolling Lidar developed by demura.net as shown in Fig.9. As far as our knowledge, it is the most advanced technology to detect small difference in level for a wheelchair size robot. Developing the small difference level detector for a commercial wheelchair and a mobility scooter for elderly, and applying the technology to a human support robot is our near future work.
 Fig.8 The results of detection of 30 [mm] difference in level by the Kinect V2.
Fig.8 The results of detection of 30 [mm] difference in level by the Kinect V2.

Fig.9 The results of detection of 25 [mm] difference in level by the Rolling 3D Lidar
- Team Description Paper
- Software
- Current out GitHub
- RoboCup2015 @Home League in Heifei, China (9th place)
- RoboCup Japan Open 2014 @Home Simulation League (3rd place)
- SourceCode.tgz by Kensei and Kosei Demura
- RoboCup@Home 2014: What did you say ?
- The Book: Robot Simulation with Open Dynamics Engine (by Kosei Demura)
- Sample programs in the book
- PowerPoint for lectures
- Team
- Adviser: Kosei Demura
- Member:Koyo Enomoto (Leader), Kazuki Nagashima, Takeaki Yamakawa, Ryo Iwasaki, Syuhei Mashimo, Kensei Demura and Kosei Demura
- Previous participation in RoboCup@Home
- RoboCup Japan Open 2012
- @Home: Real Robot League
- RoboCup Japan Open 2013
- @Home: Real Robot League
- @Home: Simulation League (only in Japan Open)
- RoboCup Japan Open 2014
- @Home: Real Robot League
- @Home: Simulation League (only in Japan Open): 3rd place (Team name: Yumekobo Junior)
- RoboCup Japan Open 2015
- @Home: Real Robot League
- @Home: Simulation League (only in Japan Open)
- RoboCup 2015, Heifei, China
- @Home: 9th place
- RoboCup Japan Open 2016
- @Home: 1st place in Education League (only in Japan Open)
- RoboCup 2016, Leipzig, Germany
@Home: 8th place
- RoboCup Japan Open 2012
- Our Sponsors:
- The Platinum Sponsor
株式会社 都筑製作所
- Gold Sponsors

- Silver Sponsors
- Bronz Sponsors
- 株式会社 金沢エンジニアリングシステムズ

- 丸文通商株式会社

- アーテック株式会社
- 株式会社 金沢エンジニアリングシステムズ


![]()