
教科書用Docker環境では4.3.8 ROS2での地図作成法で,教科書どおりコマンドを実行して地図が生成されます.そのときの,rqt_graphの出力,全ノードリストとトピックリストは次のとおりです.
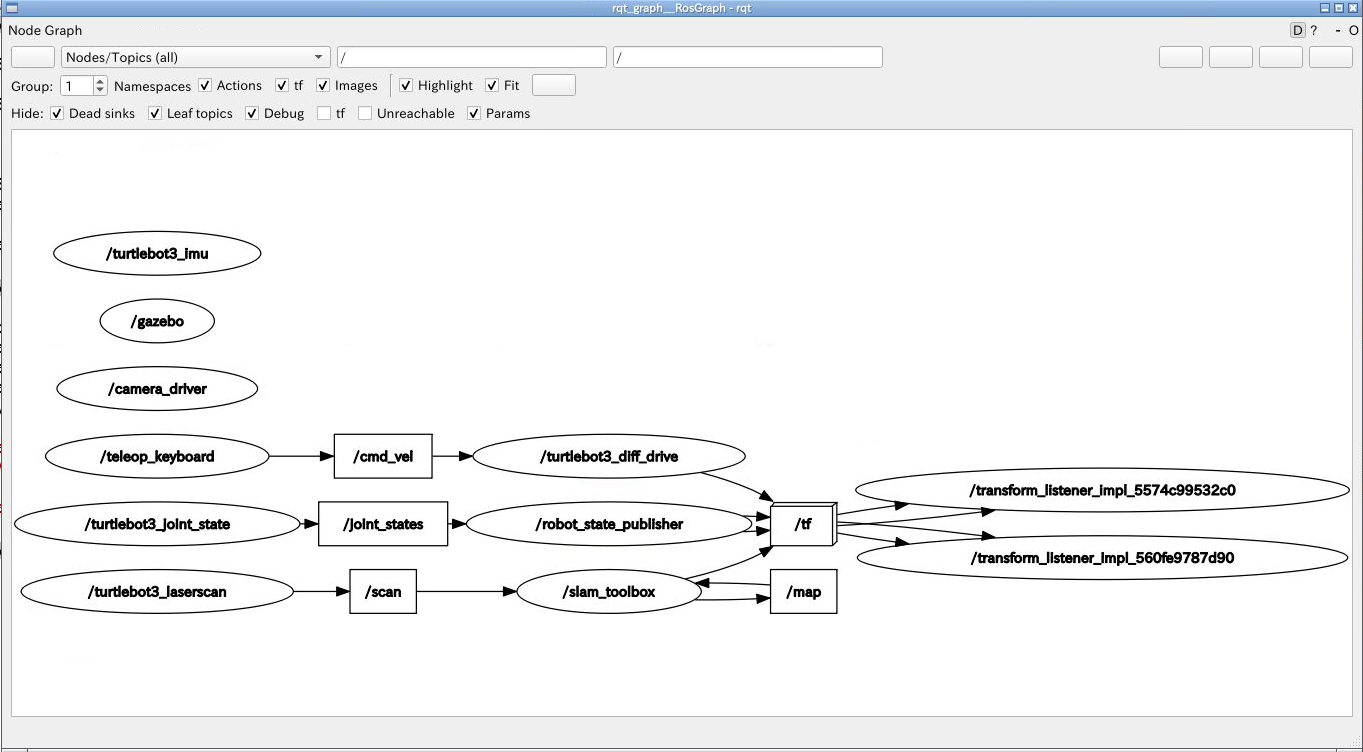
[全ノードリスト]
/camera_driver
/gazebo
/robot_state_publisher
/rviz
/slam_toolbox
/teleop_keyboard
/transform_listener_impl_5574c99532c0
/transform_listener_impl_560fe9787d90
/turtlebot3_diff_drive
/turtlebot3_imu
/turtlebot3_joint_state
/turtlebot3_laserscan
[全トピックリスト]
/camera/camera_info
/camera/image_raw
/camera/image_raw
/camera/image_raw/compressed
/camera/image_raw/compressedDepth
/camera/image_raw/theora
/clicked_point
/clock
/cmd_vel
/goal_pose
/imu
/initialpose
/joint_states
/map
/map_metadata
/map_updates
/odom
/parameter_events
/performance_metrics
/robot_description
/rosout
/scan
/slam_toolbox/feedback
/slam_toolbox/graph_visualization
/slam_toolbox/scan_visualization
/slam_toolbox/update
/tf
/tf_static
終わり

コメント