 lecture
lecture ROS演習12-2020:ロボットアーム2
この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今回は先回作った2自由度のロボットアームの先端に位置センサを取り付け、先端位置を取得するプログラムを作ります...
lecture 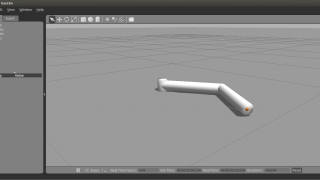 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  education
education  education
education  education
education  education
education  lecture
lecture  PD実践
PD実践  PD実践
PD実践  lecture
lecture  HARD
HARD  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture lecture
lecture lecture  lecture
lecture  lecture
lecture  lecture
lecture 