もうじき2006年も終わりですね.12月16, 17日は金沢から車で1時間ほどのところにある片山津温泉でKITの忘年会がありました.この忘年会はKITの全教職員が一同に集まる大規模なものです.大学でこのように全学規模の忘年会をやるところは大変珍しく,KITのユニークなところです.
さて,ロボコンマガジンのNo.49が12月15日(金)に発売されました.ロボコンマガジンは面白い記事が多く,No.49から産総研で開発されたHRP2 PrometのプチバージョンHRP-2m Chorometを動かす連載が始まりました.第1回目は「ARTLinuxを用いた実時間処理プログラミング」という題で小神野さんがご執筆されています.
私の連載は3回目となり寒ブリのように脂がのってきたところです. 今回はロボティクスの基本中の基本である運動学と逆運動学を高校生でもわかるように説明し,それをロボットアーム・プチシミュレータに実装し,動作を確かめるというストーリーです.詳しくはロボコンマガジンをご覧ください.
なお,ロボコンマガジンでは紙面が限られているため詳しく説明できません.このページではそれを補うため,サンプルプログラムをダウンロードできるようにリンクをはっています.ご自由にダウンロードしてください.
- サンプルプログラムをゲットしよう!
- 3関節ロボットアーム・プチシミュレータ(arm3.lzh)

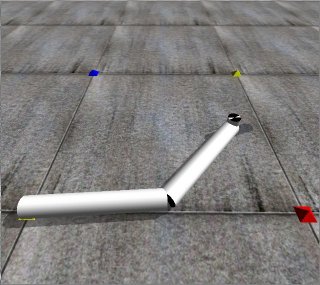
3関節ロボットアーム・プチシミュレータ (お遊び用)
また,連載を読んでよくわからない方は是非このページで質問してください.感想やご意見等もお待ちしています.
ロボットアームの世界.

コメント
tecさん,
コメントありがとうございます.
このプログラムはお作りになられたプログラムが悪い場合もでますし,モデルが悪い場合,あるいはODEの問題かもしれません.
ODE-0.11.1で同様なエラーが試されることをお勧めします.
でむ@グラーツ
demuさん,こんにちは.
上の逆運動学のプログラムを少し変えて第一関節が0°になるまで動くようにしたいのですが,0°になる直前でエラーが出てしまいます.
そのときのエラーが
assertion “bNormalizationResult” failed in c:\ode-0.9\include\ode\odemath.h304
というもので,インクルードファイルのodemath.hの304行目を見てみたのですが,よくわかりませんでした.
どうすればエラーがなくなるでしょうか?
ご回答宜しくお願いします.