KESE0 鷺森 央 (2001年製)
全方位移動機構(4輪)そのものは1999年度に一度試作しているが十分な性能を発揮できなかった。
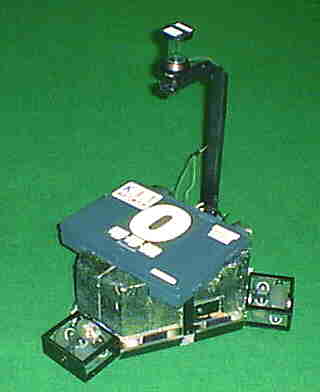
全方位移動機構の最大の問題は駆動輪の接地圧を一定に保つことである。そのためサスペンションなどを装備しなければならず機構が複雑になる。そこで、比較的接地圧が一定になりやすい3輪タイプの全方位台車を試作した。
上に見える円筒形のガラスは全方位カメラ(アコウル、型 番:HT24N GP-CX161 付き)である。CCD付で十数万円程度で購入できるので、この手のカメラとしては非常に安価である。
CCDカメラからの画像はPCMCIA Capture Card(IBM Smart Capture Card II)で取り込み、ノートパソコンのCPUで処理をする。
現在このCapture Cardが発売中止になりノートパソコンでロボットを制御しようとしている多くの人は困っているはずである。 IEEE 1394-based Digital Camera Specificationに準拠したカメラ(DVビデオカメラとは違う)のLinuxドライバがあるので、それを使うのが解決策のひとつだろう。
また、モータドライバ(自作)はノートパソコンのパラレルポートで制御している。最近のノートパソコンはレガシーインタフェースがないのでUSB2.0のモータドライバの発売が待たれる。
それまでは、デスクトップ型ロボットでRoboCupに出場せざるをえないだろう。

コメント