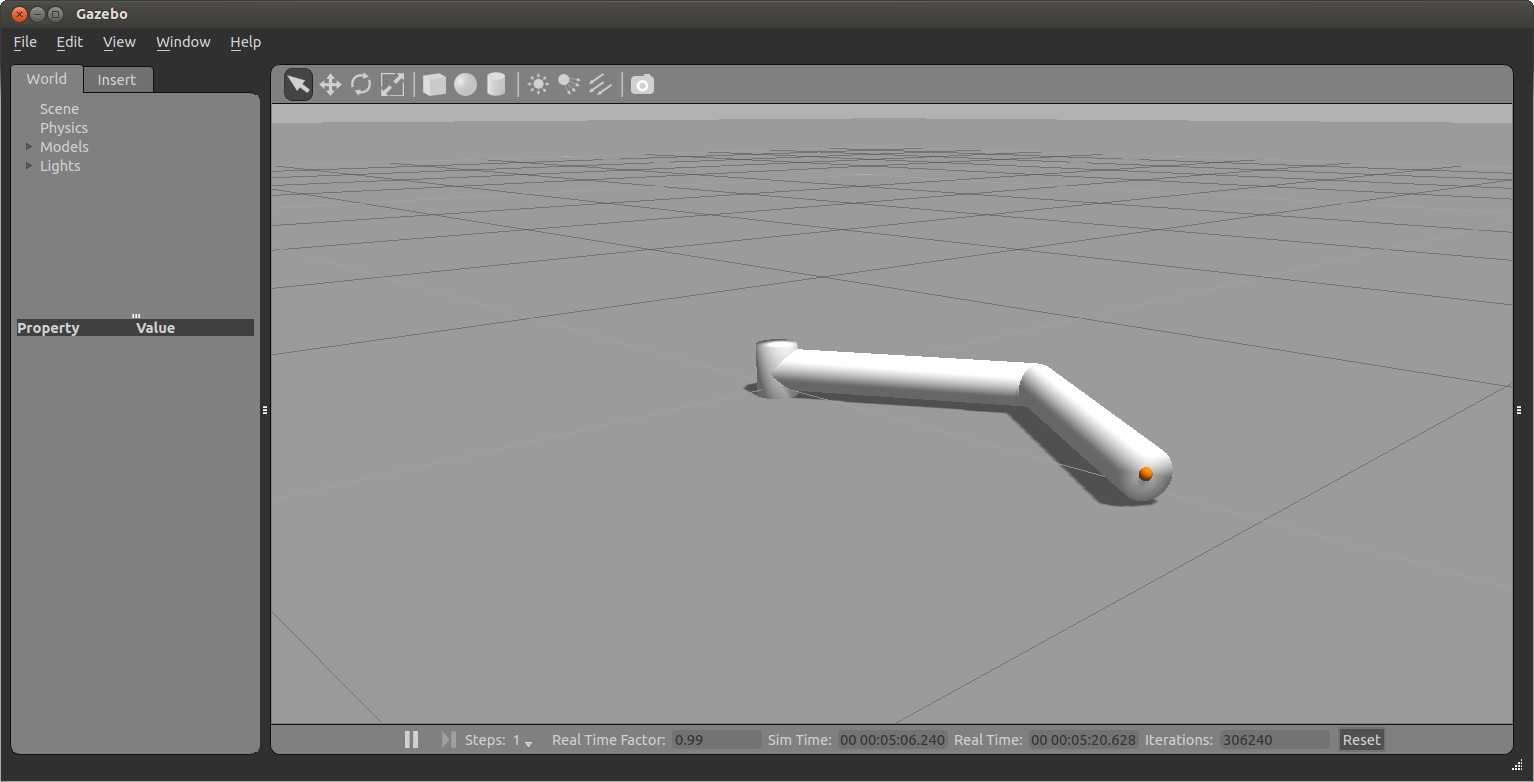
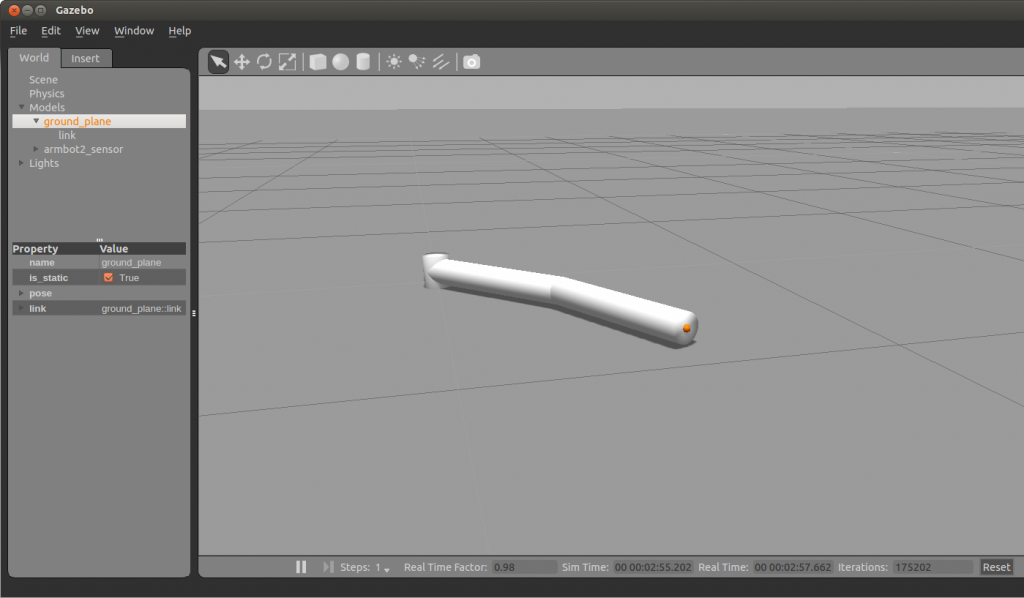
今回は先回作った2自由度のロボットアームの先端に位置センサを取り付け、先端位置を取得するプログラムを作ります。
位置センサ用プラグインの追加
gazeboのロボットモデルに位置センサを取り付けるために、~/catkin_ws/src/armbot2_sensor/urdf/armbot2_sensor.gazeboに以下のプラグインを追加します。
<gazebo>
<plugin name="p3d_base_controller" filename="libgazebo_ros_p3d.so">
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<bodyName>link_sensor</bodyName>
<topicName>/armbot2_sensor/pose_ground_truth</topicName>
<gaussianNoise>0</gaussianNoise>
<frameName>base_link</frameName>
<xyzOffsets>0 0 0</xyzOffsets>
<rpyOffsets>0 0 0</rpyOffsets>
</plugin>
</gazebo>
ソース
前週のソースコードにgroundTruthCallback関数を追加し、トピック/armbot2_sensor/pose_ground_truthTurtlebtをサブスクライブするだけで、位置センサからのデータを取得できます。
#include "ros/ros.h" // rosで必要はヘッダーファイル
#include "std_msgs/Float64.h"
#include "sensor_msgs/JointState.h"
#include "nav_msgs/Odometry.h"
using namespace std;
std_msgs::Float64 tmp_joint1, tmp_joint2;
double pos_x, pos_y, pos_z;
void groundTruthCallback(const nav_msgs::Odometry::ConstPtr& msg)
{
//msg->pose.pose.position, msg->pose.pose.orientation,
pos_x = msg->pose.pose.position.x;
pos_y = msg->pose.pose.position.y;
pos_z = msg->pose.pose.position.z;
ROS_INFO("Pose: x=%f y=%f \n",pos_x,pos_y);
}
void monitorJointState(const sensor_msgs::JointState::ConstPtr& jointstate)
{
tmp_joint1.data = jointstate->position[0];
tmp_joint2.data = jointstate->position[1];
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "teleop_sensor");
// initでROSを初期化して、my_teleopという名前をノードにつける
// 同じ名前のノードが複数あってはいけないので、ユニークな名前をつける
ros::NodeHandle nh;
// ノードハンドラの作成。ハンドラは必要になったら起動される。
ros::Publisher pub_joint1, pub_joint2;
// パブリッシャの作成。トピックに対してデータを送信。
ros::Subscriber sub_joints, sub_sensor;
// サブスクライバの作成
ros::Rate rate(10);
// ループの頻度を設定。この場合は10Hz、1秒間に10回数、1ループ100ms。
std_msgs::Float64 target_joint1, target_joint2;
pub_joint1 = nh.advertise<std_msgs::Float64>("/armbot2_sensor/joint1_position_controller/command", 100);
pub_joint2 = nh.advertise<std_msgs::Float64>("/armbot2_sensor/joint2_position_controller/command", 100);
sub_sensor = nh.subscribe<nav_msgs::Odometry>("/armbot2_sensor/pose_ground_truth", 100, groundTruthCallback);
sub_joints = nh.subscribe("/armbot2_sensor/joint_states", 100, monitorJointState);
target_joint1.data = 0;
target_joint2.data = 0;
int loop = 0;
while (ros::ok()) { // このノードが使える間は無限ループ
char key; // 入力キーの値
ROS_INFO("[Input] j: Joint1++, f: Joint1--, k: Joint2++, d:Joint2--");
cin >> key;
cout << key << endl;
switch (key) {
case 'j': target_joint1.data += 5 * M_PI/180.0; break;
case 'f': target_joint1.data -= 5 * M_PI/180.0; break;
case 'k': target_joint2.data += 5 * M_PI/180.0; break;
case 'd': target_joint2.data -= 5 * M_PI/180.0; break;
default: ROS_INFO("Input j,f,k,d");
}
pub_joint1.publish(target_joint1); // 角度を送信
pub_joint2.publish(target_joint2);
ROS_INFO("Targe: Joint1=%f Joint2=%f", target_joint1.data, target_joint2.data);
usleep(1000*1000);
ros::spinOnce(); // コールバック関数を呼ぶ
ROS_INFO("Tmp: Joint1=%f Joint2=%f", tmp_joint1.data, tmp_joint2.data);
//rate.sleep(); // 指定した周期でループするよう寝て待つ
}
return 0;
}
準 備 (ROS演習9:ロボットアームで実施した場合は必要ありません)
- $ sudo apt-get update
- $ sudo apt-get install ros-kinetic-gazebo-ros-pkgs ros-kinetic-gazebo-ros-control
- $ sudo apt-get install ros-kinetic-gazebo-plugins ros-kinetic-gazebo-ros
- $ sudo apt-get install ros-kinetic-moveit-*
- $ sudo apt-get install ros-kinetic-ros-control ros-kinetic-ros-controllers ros-kinetic-joint-state-controller ros-kinetic-effort-controllers ros-kinetic-position-controllers ros-kinetic-joint-trajectory-controller
- $ sudo apt-get install liburdfdom-tools
プログラムとビルド
- 以下を~/catkin_ws/srcディレクトリ(/home/ユーザ名/catkin_ws/src)にダウンロードする。
- $ cd ~/catkin_ws/src
- $ tar xvf armbot2_sensor-171208.tar
- $ cd ~/catkin_ws
- $ catkin_make
実 行
端末を2つ開き、次のコマンドを実行する。
- $ roslaunch armbot2_sensor armbot2_sensor.launch
- $ rosrun armbot2_sensor armbot2_sensor
- armbot2を実行している端末をクリックし、j, k, f, dコマンドを入力する毎にEnterキーを入力するとロボットアームが動く。各コマンドを入力する度にEnterキーを押さなければ動きません。jは第1関節を正方向、fは負方向、 kは第2関節を正方向、dは負方向に目標角度を5度ずつ変化させる。
演 習
- 運動学
運動学を実装しよう。その計算結果と位置センサの出力を比較し、プログラムが正しいか確認する。 - 逆運動学
逆運動学を実装しよう。2自由度の場合は解が2つあるので、数字キー1を押すと解1、数字キー2を押すと解2を選択するにしなさい。
参考リンク
- Gazebo Tutorials

コメント