 education
education PD実践2023:サンプルプログラムのダウンロード
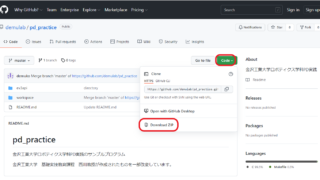
PD実践2023で使用するサンプルプログラムを次の手順でダウンロードしましょう. 次のURLにアクセスして,下図赤丸のをクリックし,赤丸で示しているをっクリックして,デスクトップにダウンロードする. ...
education  education
education  education
education  education education
education education  education
education  robocup
robocup  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  robocup@home
robocup@home 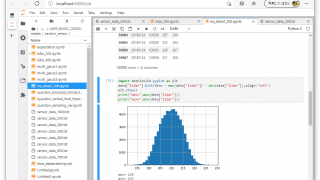 lecture
lecture  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  education education AIロボット入門
education education AIロボット入門  AIロボット入門
AIロボット入門  education
education  robocup@home
robocup@home  education
education  education
education