ペナルティキックのサンプルプログラム
(ここをクリックするとWindows用デモプログラムをダウンロードできます)
簡単にODE本「簡単!実践!ロボットシミュレーション Open Dynamics Engineによるロボットプログラミング」の内容を紹介します。
ロボット工学なら東工大の広瀬教授の名著「ロボット工学-機械システムのベクトル解析-」をはじめとして優れた教科書が既にたくさん世に出ています。また、C言語などのプログラミングに関する教科書ならさらに多くの書籍が書店に並んでいることでしょう。
ところが、両者を橋渡しするような教科書をほとんど見かけません。私はロボカップに1999年から参戦してきましたが、計算機科学を学んだ私にとってはロボットを動かすこととプログラムの関係が当初よくわからず、経験しながら身につけていきました。それとは逆に、ロボット工学を学んだ方にとっては、その理論をプログラムにすることは簡単ではないかもしれません。
そこで、本書はロボット工学の基礎理論とプログラミングを有機的に結びつけるため、お金がかからず手軽にロボットプログラミングを体験する手段としてオープンソースの動力学計算エンジンOpen Dynamics Engineを使っています。この種のスキルは手続き型記憶とよばれ実際に体験しない限り身に付きません。本書の目指すところは、ロボットを動かすための基礎理論とそれを実現するプログラミング能力を身に付けることなのです。
以下、ユニークな特徴を紹介します。
- ロボット工学の基礎とそのプログラミングを学べる実践書
- 段階的に車輪型ロボット(差動駆動、全方向移動)、ロボットアーム、4脚、ヒューマノイドロボットのシミュレータを作り、そのロボット上に基本的なアルゴリズムをプログラムしていきます。最終課題はヒューマノイドロボットを歩かせることです。なお、プログラムはC言語で書かれWindows、Linux、Mac OS Xに対応させます。
- ODE英文ユーザーガイドを読まなくてもプログラム可能
- API索引、API逆引き索引有
- 本書の約半分はODEに関する事項(チュートリアル&マニュアル機能)
- ODEを開発したスミス氏とは何回かメールをやりとりしました。こころよくODEのユーザーガイドの引用、転載等を許可して頂きました。ODEがなければこの本は誕生しなかったのでスミス氏に感謝の念を込め、微力ながらサポートするために、本書の売り上げ1冊につき1ドルをODEプロジェクトへ寄付します。森北出版様にも協力して頂きました。このようなオープンソースのプロジェクトを維持・発展させていくためには多くの方の協力が必要だと思います。人は霞(かすみ)を食べて生きていけるわけではありませんしね。
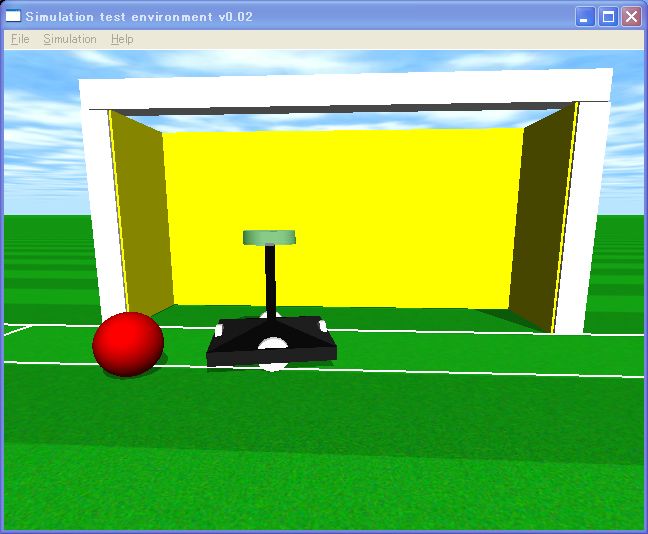
デモプログラム
- 概 要
- ロボカップの中型ロボットリーグを題材に、ペナルティキックのシミュレーションをします。ロボットやゴールなどは既に作ってあるので、読者の皆さんはこのロボットにゴールキーパーのプログラムを実装することが演習となります。サンプルでは既にシンプルなプログラムが実装されているため、キーパーが自動的に動きます。
- keeper.zipを好きなところへ解凍
- keeper.exeをダブルクリックするとデモプログラムが起動
- sキーを押すと、ランダムな方向にシュート
- pキーで右方向へシュート
- qキーで左方向へシュート
- bキーでボールが元の位置へ戻る
- eキーで終了
- デモプログラムにはソースコードが入っていません。これはキーパーの動作プログラムを読者の皆さんに実装してもらうためです。それ以外のソースコードはこのウェブサイトで本が発売されたら公開します。

コメント